三菱运动控制器在小型辊锻传送系统中的应用
本控制系统采用三菱性能优良的运动CPU系统,通过使用高速串行通信方式,运动控制器和伺服放大器之间可以快速连接,简化接线。软件避开烦琐的参数设置及控制程序,采用运动SFC程序,实现复杂的伺服控制。
一 概述
辊锻传送系统是锻造行业应用较多的系统。该系统由辊锻机,机械手传送机构组成,替代传统的自由锻,人工送料系统。辊锻传送系统提高了自动化水平,提高产品质量精度,降低了工人劳动强度,节约成本。本文介绍的辊锻传送系统应用于某五金厂。
二 辊锻传送系统结构
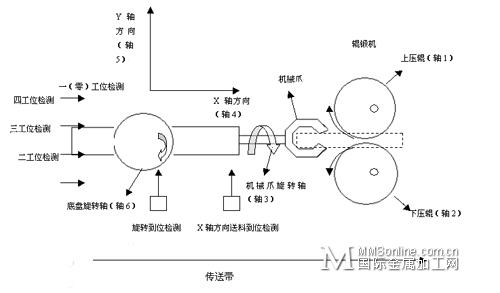
辊锻传送系统由辊锻机,机械手传送机构组成。其中,辊锻机由上下两个压轮,模具组成。模具固定在上下两个压轮上,由滚轮带动实现对产品的锻压。滚轮由两台15K伺服电机同时转动实现模具同步滚压。机械手传送机构由机械爪转动轴,X方向送料轴,Y方向工位移动轴,底盘旋转轴以及部分定位传感器组成。具体如下图:
三 控制流程
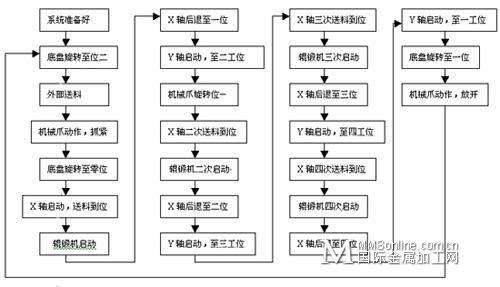
辊锻机由两台MR-J2S-15K B4及HA-LFS15K14驱动。上下压辊同时启动,保持同步;机械手传送结构主要由四台MR-J2S-700B及HC-SFS702驱动。上下压辊启动由X轴方向送料到位检测,机械瓜夹紧信号及压辊零位信号启动。每工位转动一圈,回到原点,压辊转动过程中X轴伺服OFF,处于自由滑动状态,自由滑动到位一检测信号接通(送料到位信号断开)后,X轴伺服ON,Y轴启动,由第一工位运动至第二工位,二工位检测信号接通,机械爪旋转轴旋转一定角度后,X轴启动快速行进至二工位,到位检测信号接通,X轴伺服OFF,处于自由状态,上下压辊启动。如此,进行三工位,四工位辊压成型。四个工位结束后,Y轴返回一工位,机械瓜旋转轴返回原角度;底盘旋转轴转动一定角度,旋转到位检测一接通,机械爪松开,成型产品被送入传送带。机械爪松开后,底盘旋转轴继续旋转一定角度,旋转到位检测二接通,自动送料系统开始送料,有料检测接通后,机械爪抓紧;夹紧信号接通,底盘旋转轴旋转至原始位置,周期工作开始。
四 控制系统
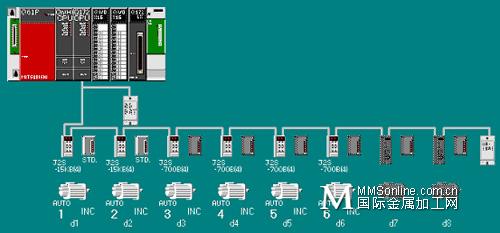
整个控制系统由6轴组成,压辊轴功率较大;从性能稳定性考虑,我们选用两台MR-J2S-15KB4及HA-LFS15K14驱动上下压辊;四台MR-J2S-700B及HC-SFS702驱动机械手传送结构。控制系统选用多CPU系统:Q02CPU+Q172CPUN,Q172CPUN最多可以控制8轴,编程方便简单。用SSCNET总线与伺服放大器进行连接,方便可靠。具体参见下图:
五 主要输入输出信号列表
六 运动SFC程序
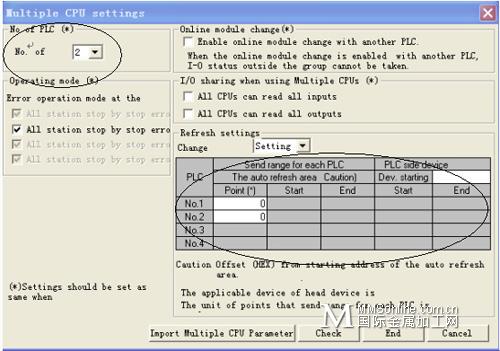
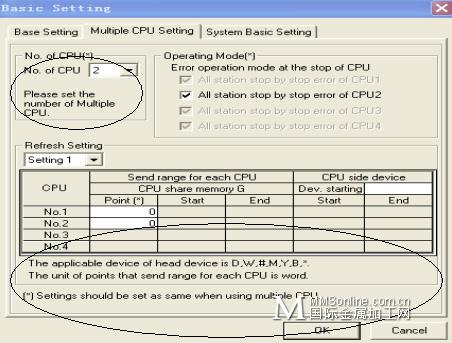
运动SFC程序(包括系统参数的设置等)采用MT Developer编写,整个程序分为主程序,自动运行,手动运行三部分。SFC程序采用自动运行方式,用外部输入信号作为触发器来启动伺服程序。多CPU 系统设置时选择2个CPU,刷新地址采用自动刷新,不必设置地址;伺服单位系统选用脉冲单位。 程序工步流程图如下:

多CPU系统设置参考如下:
Q02CPU设置:
Q172CPUN设置:
结束语
本控制系统采用三菱性能优良的运动CPU系统,通过使用高速串行通信方式,运动控制器和伺服放大器之间可以快速连接,简化接线。软件避开烦琐的参数设置及控制程序,采用运动SFC程序,实现复杂的伺服控制。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈
