- 码垛机器人工艺流程及故障排除浅析?2015-04-17
- 工业机器人构成及工作原理?2015-04-17
- 工业机器人介绍五问五答?2015-04-17
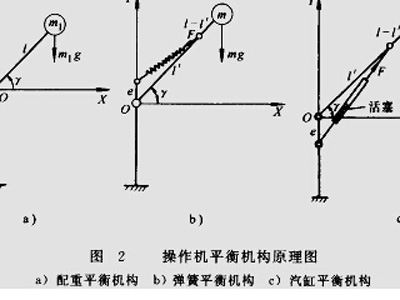
- 工业机器人操作机设计原则和设计方法2015-04-13
- 如何设计使用德国BAHR直线导轨设计坐标机器人2015-03-27
- 工业机器人电磁兼容性调试方法2015-03-25

- 发那科弧焊机器人R-0iB手册2015-03-25


- 发那科机器人为Valen焊工减负2015-03-25