激光扫描技术在船舶逆向工程中的作用
逆向工程也称为反求工程,是指用一定的测量手段对实物或模型进行测量,根据测量数据通过三维几何建模方法,重构实物的cAD模型,从而实现产品设计与制造的过程。与传统的设计制造方法不同,逆向工程是利用测量手段准确快速地测量样品表面数据或轮廓外形。加以点数据处理、曲面创建、三维实体模型重构。可以通过对已有产品进行数据测量、拟合、分析,快速实现改进设计。逆向工程已经成为工业领域吸收消化和二次开发的一种重要手段。激光扫描技术为逆向工程提供了强大的技术支持。
激光扫描测量技术是最近发展迅速的一种新技术,已成为空间数据获取的一种重要技术手段,它是集光学、机械、电气控制和计算机技术于一体的高新技术。主要是利用激光快速对物体空间外形和结构进行逐点扫描测量,从而获取物体表面上亿万个点的空间坐标和颜色信息。再通过计算机对测量数据的拼接完成整个物体表面形状的拟合,最终将实物立体准确复现。将激光扫描测量技术应用于舰船逆向工程可以快速获取目标实物的精细三维坐标,生成具有可测量性的高精度、高密度点云数据,利用配套软件进行建模处理,得到物体的三维立体模型、剖面图、断面图、计算面积、体积,作为形体分析、深人设计的基础。
与传统的测量手段相比,激光扫描技术有自己独特的优势:①数据获取速度快,实时性强;②数据量大,点位密集,精度较高;③主动性强,能在各种环境下工作;④全数字特征,信息传输、加工、表达容易等。激光扫描仪使测量工作从传统的单点采集数据变为密集、连续地自动获取大量数据,大大地增加了信息量,提高了工作效率。可以说激光扫描技术是一项测量技术革新,将使测量数据的研究内容、研究方法进人新的发展阶段。
激光扫描技术在我国相关领域的应用刚刚起步,很多科研机构和院校正在加快地面三维激光扫描技术的基本理论和技术应用方面的研究。国内有用短距离测量头进行单个汽车零件的测量、艺术头像的测量,以及中长距离的测量头进行地形、古迹等场景的测量,但基本上处于起步阶段,需要人工干预多,没有形成一个较完整的面向某种应用的系统。
在国外,成熟的微观和短距离三维激光扫描测量技术已经较为广泛地应用于医学研究与临床诊断治疗、机器人三维可视化、工业产品的模具设计和制造等方面,如零件的快速成型工艺、汽车模型制造、手机模型设计等领域。
激光扫描技术应用于船舶工业在国外也已见诸报道。2003年,荷兰科学家成功地将光学测量技术应用于舰船维修中,他们将需改建或已损坏的舰船区域进行测量后进行模型重建,并使用通用的CAO/CAM软件进行工程造型,制造新的船壳来替换损坏的区域,降低了测量、工程图制作等人工耗时。
1 激光扫描硬件系统的分析与设计
激光扫描技术应用于舰船逆向工程的研究,重点是针对激光扫描全过程(数据获取、数据后处理、容积计算、三维可视化表达)中的关键技术问题进行系统的研究,形成一套舰船曲面外形逆向工程适用的方法。具体内容包括了激光扫描点云数据的组织管理、噪声的自动剔除、关键信息的自动化提取等处理与分析、复杂物体表面的自动建模、基于点云及模型的容积计算方法、真实模型的快速可视化表达、与CAD接口和成图等方面进行较深人的研究,并具体研究开发相应数据后处理、三维成图应用软件系统。
下面介绍系统的组成及信息交互模式。
系统框架如图1所示,首先通过三维激光扫描仪和附带的CCD摄像头,由专用软件如Cydone将舰船外壳、舱体等对象按测量规划进行现场数据采集;用专用拼接软件polyworks或GeomagiC将所采集的多站位数据进行拼接和数据处理。然后根据采集的对象特点,对采集的数据分别以基于数学方法用C语言开发的数据处理包或基于专业处理软件等方法获取船体曲面表达。最后在通用的CAD平台UGll上将舰船壳体曲面及构件进行结构建模装配后,计算相应的舱容并进行二维出图和模型可视化表达。整个系统建立在具有舰船曲面重构所需信息的数据库和知识库上,使得在不同平台上开发的各个模块得到数据流、信息流的统一,有利于数据的管理、信息的互访及知识的共享。
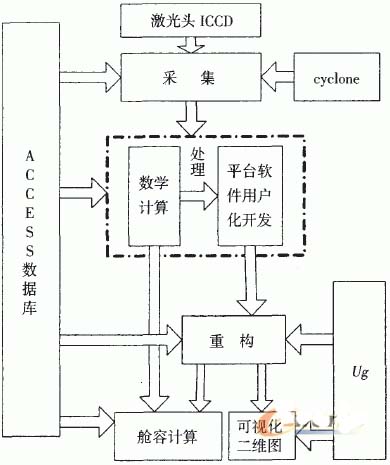
图1 系统框架
主要介绍目前引进的激光影像扫描测量技术以及激光扫描技术在船舶逆向工程中的应用,并对基于装配技术的船舶液舱模型的建立进行了分析。
2 激光扫描硬件系统的数据采集处理
2.1 舰船舱数据采集过程
(1)分析常用的舰船主尺度、结构特点、舱布局方式,对不同的对象研究作业规划参数、特点及整体和局部流程。
(2)通过粗扫描,来获取舰船主参数,采用测量参数定义办法采集满足舱容计量测量精度要求的、点数合理的数据包。并通过试验评估激光扫描仪本身及其在大曲面测量中的精度。
2.2 数据处理流程
点云数据、激光影像和光学成像数据是激光扫描的直接原始观测数据成果,其中包含高密度的空间及属性信息;突破传统测量数据的处理方法,进行新的数据挖掘和开发研究;激光扫描数据的后处理为本研究的重点。图2和图3表达了整个系统中的各模块节点之间为实现从激光扫描到舱容计算等的支撑平台、信息流及输人输出格式等的关系。
/images/128314437619843750.jpg)
图2 点云数据预处理
/uploads/allimg/151004/00333H960-2.jpg)
图3 数据建模
2.3 无序点云的有序化
从测量获得的是经转换的点云文件,其输出格式是以xYZ为后缀名的文件,它是一种文本格式的散乱点云文件,给后续的数据处理带来了很大的不便,为此,首先需要进行有序化处理。其实,不同的扫描仪都有自己独特的内部数据格式。我们使用的是leicaHDS3O00扫描仪,它的原始数据内部记录了旋转角度、坐标原点、间隔等信息。这些信息对后续的数据处理软件来说十分重要,但它的格式不公开,因此我们在研究三维扫描仪及其控制软件管理的各站数据的数据库格式基础上,建立一个高效的将无序点云有序化处理的软件包。
2.4 构件的识别
通过专门的软件来拼接各站数据、消除大的噪声、进行用户坐标转换后,将船舶特征点云组合,进行手工一分割后,交予开发的点云数据机器学习模块,为后续的同类特征识别提供基础。已有的CAD系统UGllNX提供了丰富的二次开发下具构建点云拟合系统,不仅可提供各种特征库,而且允许用户对一些通用特征进行定义,并提供与通用CAD标准(例如IGES、STEP等)的接口。以uGll系统作为开发平台,对其提供的特征类进行封装,使用智能特征识别与交互特征识别相结合方式实现特征识别;利用二次开发建立特征树,实现构件三维模型的重建。
2.5 基于数学有限网格的舱容计算
对于双底双壳无内构件的船舱来说,可以直接利用所测量的密集点云进行舱容计算。将排序好的点进行均匀网格化后,构建液位数据面计算舱容。
2.6 曲面反求
首先要进行去除杂点,然后将点云分片。在这里用到UG软件。船体等复杂构件,其外形曲面件是由许多基本子曲面通过光滑连接、修整、裁剪、过渡拼合而成的复合曲面。先把这些型值点导人uG软件中进行建模。选用UG是因为它有优良的曲面编辑功能,能很好满足船体曲面特性的要求。而且UG软件带有检测功能,可以及时地对cAD模型和点云进行检测,以判断是否达到精度要求。如果达到要求,进行下一步处理;不然,需进行修改。其实这是一个迭代的过程,最终要达到允许的误差精度。除此之外,UG还提供连续性检查和具有编辑功能,这对于像船舱这样要求光顺的CAD模型而言是极为重要的。
2.7 壳体曲面与构件的装配
对船舱构件自动装配问题的关键在于如何找到各构件间在统一坐标系下的空间坐标分布。而整个检测建模系统中有两个地方要用到此技术。一个是在对于单个船舱中各构件的装配;另一个是在将各单舱装配成整船时。对于第一种情况,由于船舱建模的所有信息都来自于点云,而一个单舱的点云图可以完全反映出船舱中各构件间的位置关系。我们将利用建模软件的坐标查询功能求出定位点的坐标,并将其导人装配程序进行各组件的自动装配。对于第二种情况,由于各舱之间的点云坐标是相对独立的,因此我们必须借助坐标转换和各舱间的相对位置关系进行装配。
2.8 二维图输出与三维显示
研究将现场测量坐标系、舱容计量坐标系和设计坐标系相互之间的转换关系,通过二维模板开发舰船型线图的绘制模块。通过CCD采集的船舶外表图像纹理,将舰船外观通过贴图方式较真实地三维展现。
3 结语
激光扫描技术可以快速获取密集的三维点云数据,是重构复杂曲面物体的理想工具,但由于采样的是海量数据,数据的有效组织管理和处理是研究的难点。在使用通用软件实现数据初步处理后,一定要结合实际应用,开发有针对性的软件才能满足实际工作的需要。在实际应用时,还必须注意保护知识产权,当然这是另一个领域的问题。
声明:本网站所收集的部分公开资料来源于互联网,转载的目的在于传递更多信息及用于网络分享,并不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议。本站部分作品是由网友自主投稿和发布、编辑整理上传,对此类作品本站仅提供交流平台,不为其版权负责。如果您发现网站上所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容,以保证您的权益!联系电话:010-58612588 或 Email:editor@mmsonline.com.cn。

- 暂无反馈
